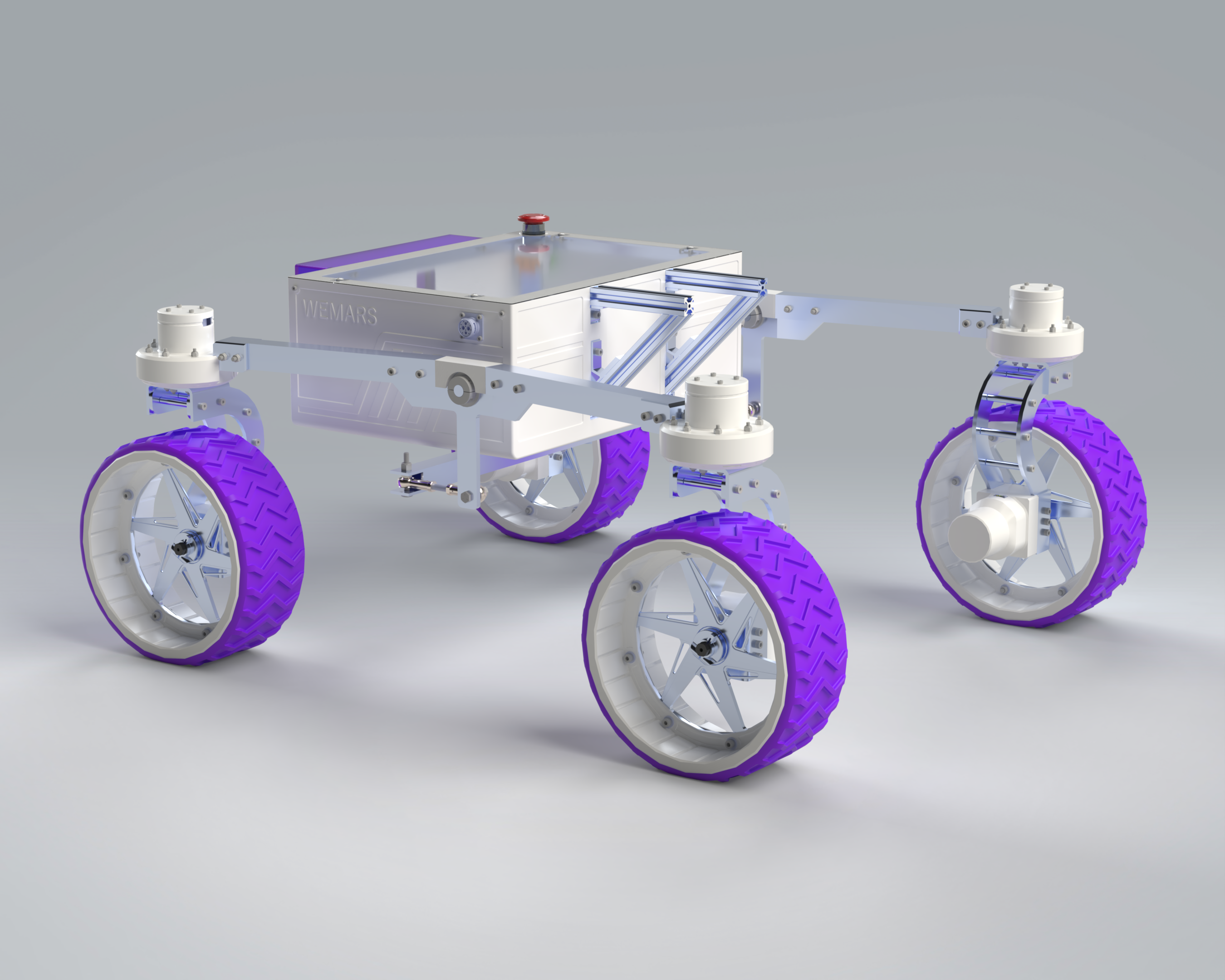
Mechanical
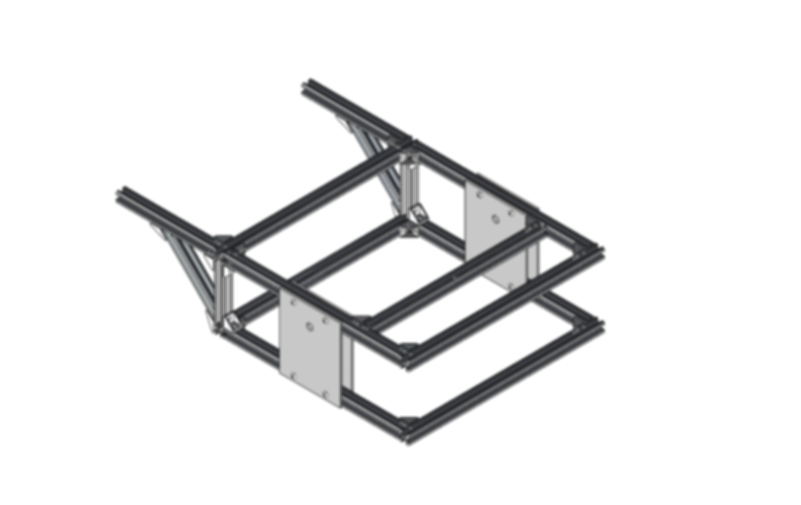
We design, test, and build everything mechanical on the rover, from material selection and CAD to prototyping and manufacturing. Our focus is on parts that hold up on rough terrain and still handle precise work with the arm.
We work closely with electrical and software to make sure everything fits together. Right now we're building a new rover and using what we learned at past competitions to push past what we've done before.
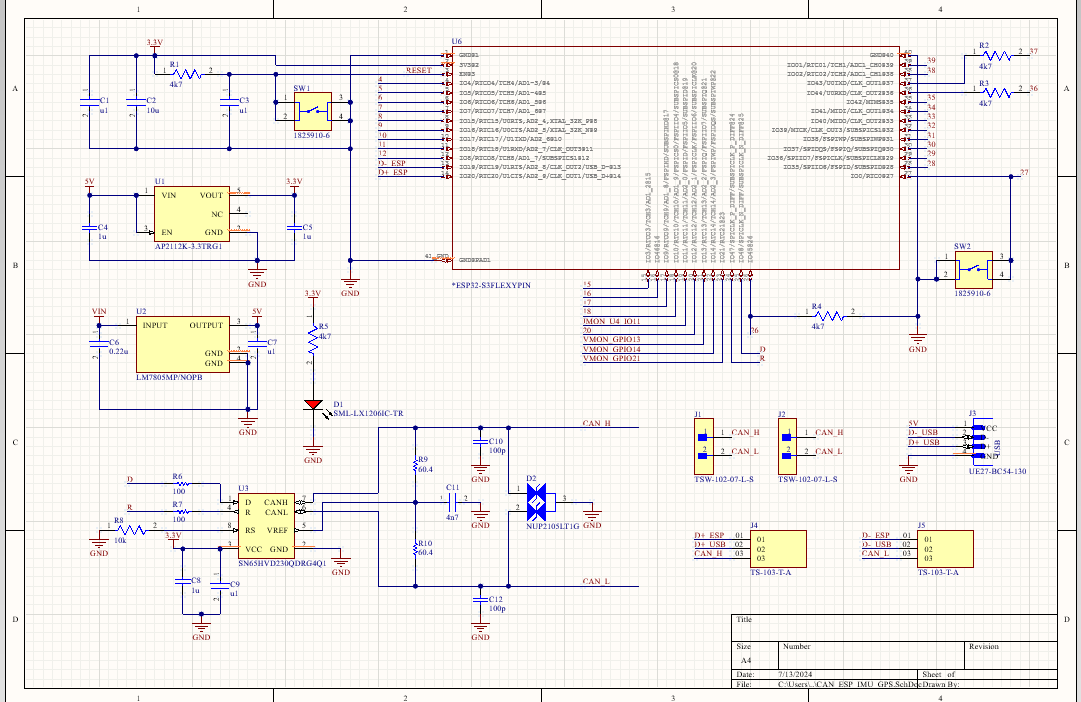
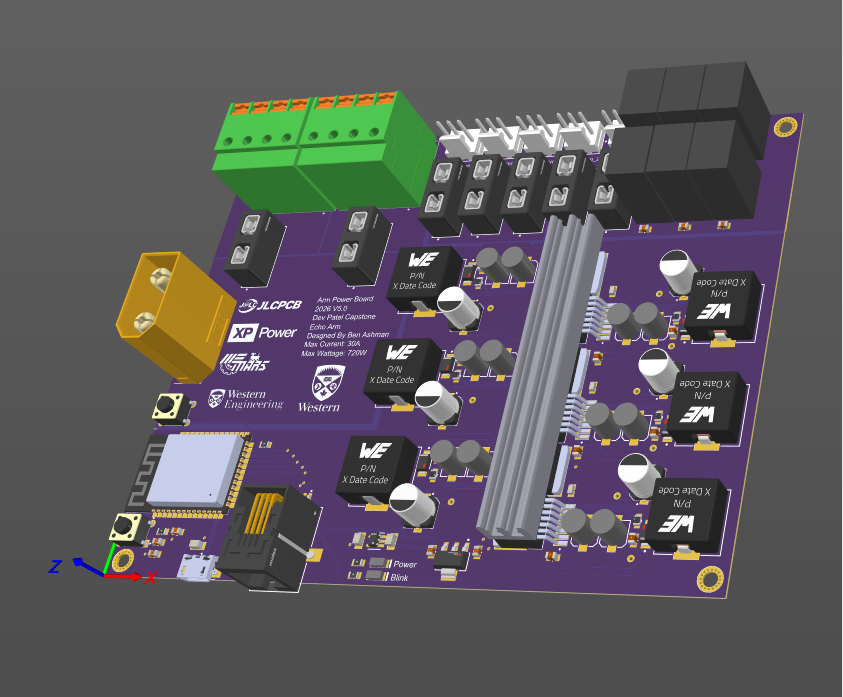
Electrical
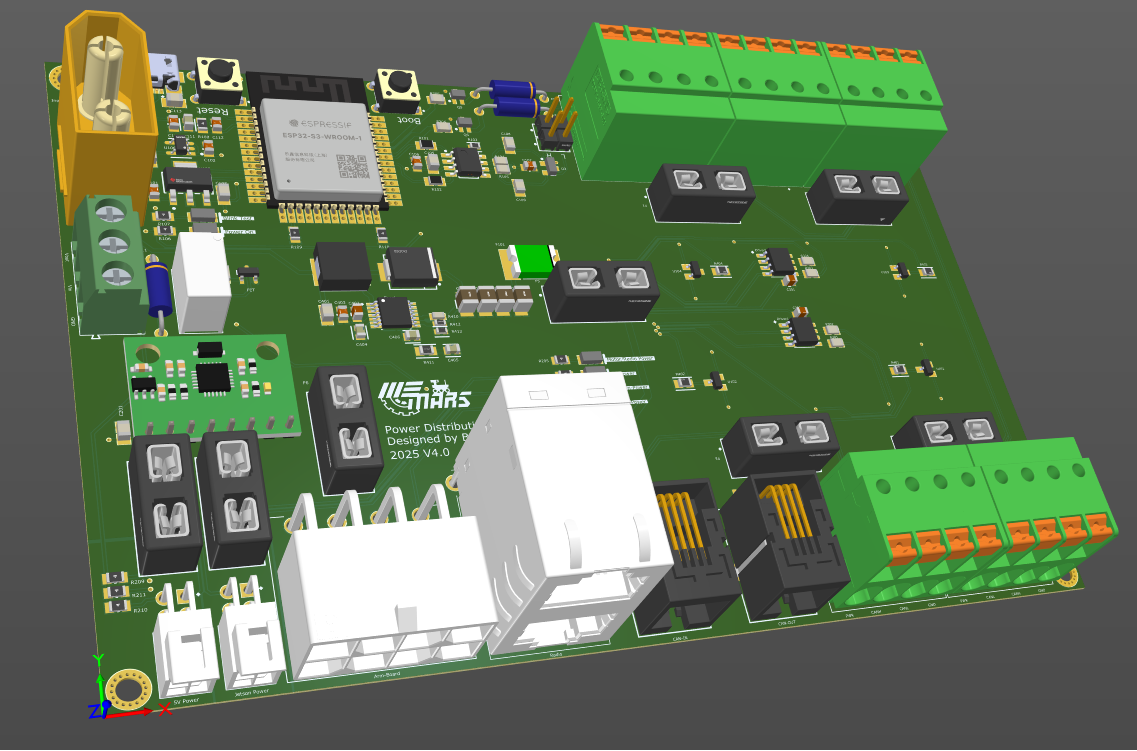
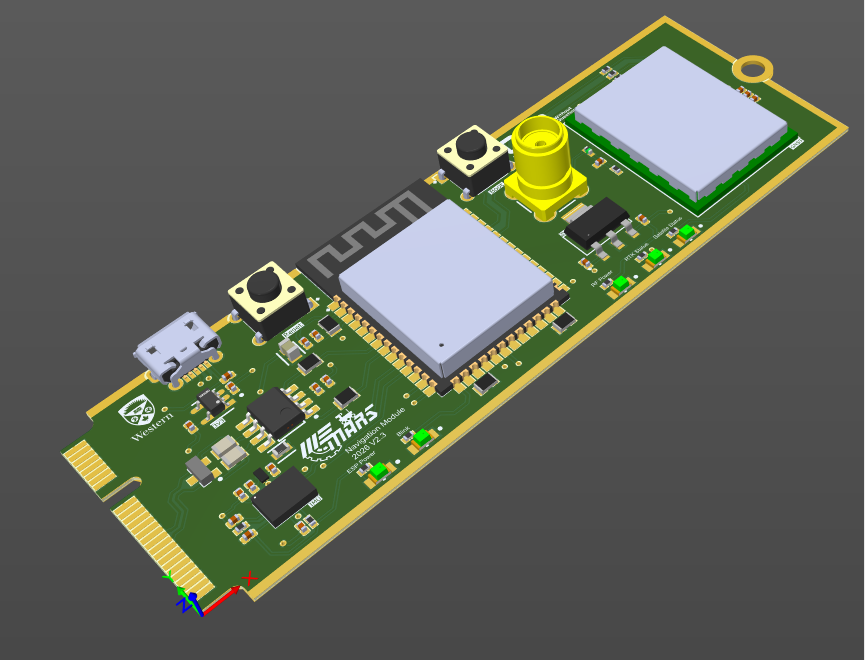
We handle all the hardware on the rover and build a lot of it in-house: power distribution, GPS, IMUs, CAN communication, and more. Team members pick up PCB design in Altium, embedded systems, circuit protection, and getting different boards talking to each other.
We keep the arm and motors powered for mechanical and run the sensors and computers software needs, so staying in sync with the other subteams is a big part of the job. This year we're focused on our upgraded PDB and a modular board architecture that reduces wiring across the rover.
Software
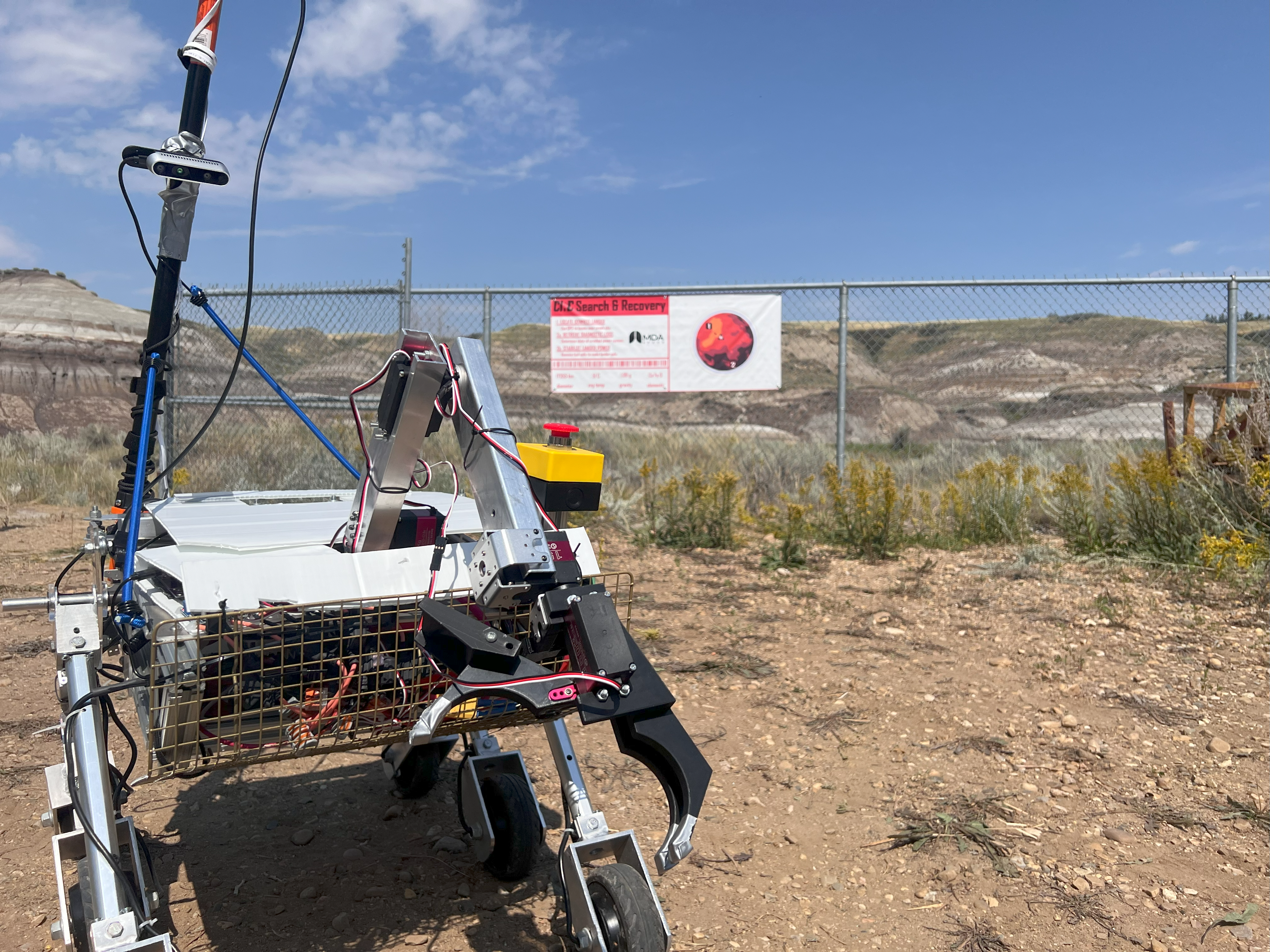
We get motor control, sensors, CAN bus, and communications running on the rover. Right now we're bringing sensors like LiDAR, cameras, IMU, and GPS online through ROS2.
We're using last year's rover as a test bed so when the new build is ready, most of our software drops in with minimal rework. This summer we're hoping to push into autonomous navigation and computer vision.

Business
We manage the team's money: sponsors, purchases, and keeping track of where funds go. With a brand-new rover in the works, landing sponsors makes a real difference.
We also handle team apparel and plan social events so people get to know each other outside the lab.

Science
We build the tools to collect and analyze soil samples, including holders and testing procedures. Right now we're working on a sampler that mounts to the arm so we can swap payloads without rebuilding the whole setup.